|

|
|
Research Projects |
Smart Sensor Networks
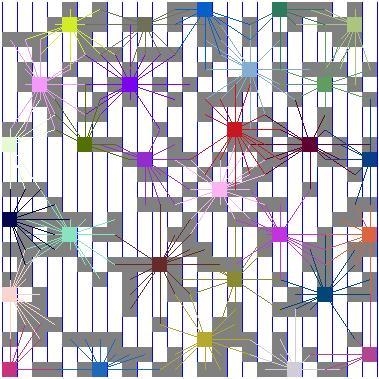 Smart Sensor Networks (S-Nets) consist of a set of distributed devices
which are capable of computation, communication and sensing. Our work
addresses the creation of an information layer on top of the sensor
nodes. The information processing issues include the representation
of information and knowledge, the processing of that information, and
the development of efficient, robust, scalable algorithms; we have
contributed distributed algorithms for leadership protocols,
coordinate frame and gradient calculation, reaction-diffusion pattern
formation, and level set methods to compute shortest paths through the
net.
Smart Sensor Networks (S-Nets) consist of a set of distributed devices
which are capable of computation, communication and sensing. Our work
addresses the creation of an information layer on top of the sensor
nodes. The information processing issues include the representation
of information and knowledge, the processing of that information, and
the development of efficient, robust, scalable algorithms; we have
contributed distributed algorithms for leadership protocols,
coordinate frame and gradient calculation, reaction-diffusion pattern
formation, and level set methods to compute shortest paths through the
net.
Treadport Locomotion Interface
 Treadmills are an example of a locomotion device allowing a user to
walk in a relatively normal manner without significant change in
actual location. Our research deals with combining more sophisticated
locomotion devices with visual displays in order to construct true
locomotion interfaces which will allow a user to interact with a
virtual world by walking through that world.
Treadmills are an example of a locomotion device allowing a user to
walk in a relatively normal manner without significant change in
actual location. Our research deals with combining more sophisticated
locomotion devices with visual displays in order to construct true
locomotion interfaces which will allow a user to interact with a
virtual world by walking through that world.
 The goal of this project is to add a sense of contact and manipulation
in the CAD design of mechanical assemblies. Part interaction,
assembly, and manipulability can then be evaluated without fabrication
of physical prototypes. A haptic device, the Sarcos Dextrous Arm
Master, is being employed as a real-time interface to the Geometric
Design and Computation (GDC) research group's Alpha_1 CAD/CAM system.
The goal of this project is to add a sense of contact and manipulation
in the CAD design of mechanical assemblies. Part interaction,
assembly, and manipulability can then be evaluated without fabrication
of physical prototypes. A haptic device, the Sarcos Dextrous Arm
Master, is being employed as a real-time interface to the Geometric
Design and Computation (GDC) research group's Alpha_1 CAD/CAM system.
Fingernail Sensors
 In order for humans and machines to interact naturally together, there
needs to be a means for the machine to unobtrusively monitor what the
human is doing, especially with the hands and fingers. Miniaturized
optical sensors placed on the fingernail measure the blood perfusion
in the fingertip, which changes as a function of finger posture and
touching forces at the fingertip. This research aims to develop models
of the fingertip and fingernail sensor system that can predict the
state of the fingers based on the sensor signals. Once the models are
accurately calibrated, the fingernail sensor system could be used to
teleoperate a robot, interact with a virtual environment, or learn
about how humans interact with the real world through tactile manipulation.
In order for humans and machines to interact naturally together, there
needs to be a means for the machine to unobtrusively monitor what the
human is doing, especially with the hands and fingers. Miniaturized
optical sensors placed on the fingernail measure the blood perfusion
in the fingertip, which changes as a function of finger posture and
touching forces at the fingertip. This research aims to develop models
of the fingertip and fingernail sensor system that can predict the
state of the fingers based on the sensor signals. Once the models are
accurately calibrated, the fingernail sensor system could be used to
teleoperate a robot, interact with a virtual environment, or learn
about how humans interact with the real world through tactile manipulation.
Wet Robotics
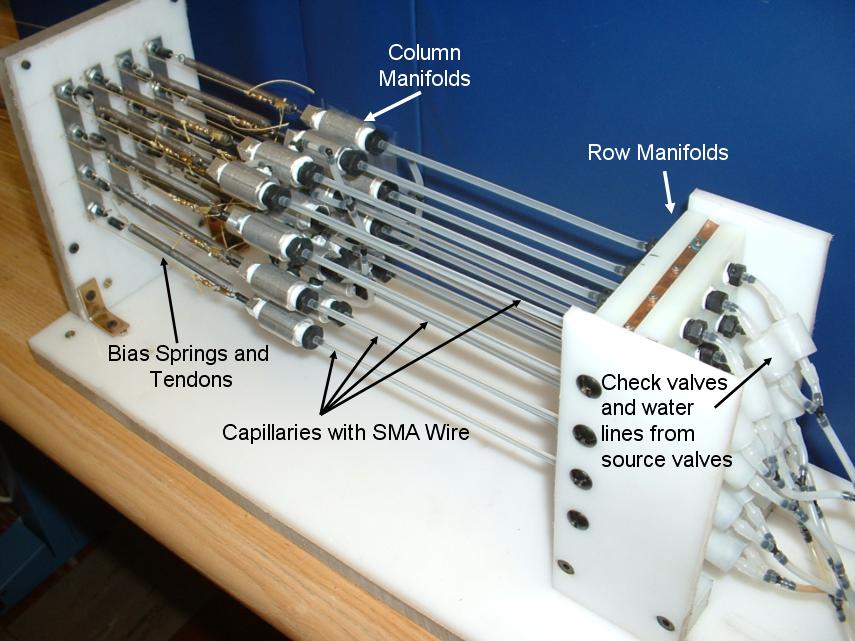 As robots become increasing complex and more like humans, they will
need to have increasing numbers of muscles or actuators within a
compact volume. The goal of this research is to develop new types of
actuator systems, architectures, and methods of control that would
allow arrays of hundreds or even thousands of small but powerful
actuators to be arranged and controlled in a fast, efficient, and
scalable manner. Currently, this is achieved by embedding Shape Memory
Alloy "muscles" within a network of biologically inspired "robotic
blood vessels" that fluidically distributes thermal energy to and from
any actuators in the array using only a small number of valves.
As robots become increasing complex and more like humans, they will
need to have increasing numbers of muscles or actuators within a
compact volume. The goal of this research is to develop new types of
actuator systems, architectures, and methods of control that would
allow arrays of hundreds or even thousands of small but powerful
actuators to be arranged and controlled in a fast, efficient, and
scalable manner. Currently, this is achieved by embedding Shape Memory
Alloy "muscles" within a network of biologically inspired "robotic
blood vessels" that fluidically distributes thermal energy to and from
any actuators in the array using only a small number of valves.
Neural Control of Artificial Arms
Signals from electrodes placed in remnant peripheral nerves of an amputee are used to control an artificial arm. The electrodes are longitudinal intrafasicular electrodes (LIFEs) developed by Ken Horch of the Department of Bioengineering. The electrodes can be used to detect efferent neurons for control or to stimulate afferent neurons for sensation. Data from human subjects has been collected and is now being analyzed. Current work is focused on the determination of the statistical nature of the neural signals. The results will aid in the design of optimal signal processing of the neural signals for control use.
Stability of Quadruped Trotting using Directional Compliant Legs
 Trotting quadrupeds such as dogs have compliant joints. It has been
shown that the kinematic configuration of the fore and hind limbs
creates a directional compliance with reference to the shoulder/hip
joints. The term directional compliance is defined as the compliance
tensor as seen by a joint or body. The off-diagonal terms of the
tensor cause a directionally compliant spring to have different
properties than simple springs. For instance, if a simple spring is
compressed, it will have a normal force opposite the direction of the
displacement. A directionally compliant spring when compressed in the
same manner will not only have the normal force but also have a shear
force. This type of compliance can provide dynamic stability by
directing the ground reaction forces through the center of mass of the
body. Dynamic simulations have shown that stability can be achieved
passively with such as approach.
Trotting quadrupeds such as dogs have compliant joints. It has been
shown that the kinematic configuration of the fore and hind limbs
creates a directional compliance with reference to the shoulder/hip
joints. The term directional compliance is defined as the compliance
tensor as seen by a joint or body. The off-diagonal terms of the
tensor cause a directionally compliant spring to have different
properties than simple springs. For instance, if a simple spring is
compressed, it will have a normal force opposite the direction of the
displacement. A directionally compliant spring when compressed in the
same manner will not only have the normal force but also have a shear
force. This type of compliance can provide dynamic stability by
directing the ground reaction forces through the center of mass of the
body. Dynamic simulations have shown that stability can be achieved
passively with such as approach.
Compliant Frame Modular Robotic Systems
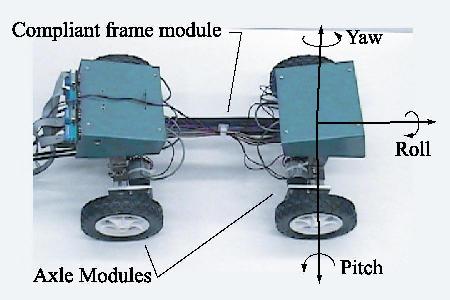 Mobile robots are integral to space exploration and many military
activities. This research examines a new robot architecture that
provides advanced maneuverability, suspension to adapt to uneven
terrain, and modularity to adapt to different tasks. This is
accomplished by coupling differentially steered axle modules with
compliant frame elements that allow relative roll, pitch, and yaw
between the axles. While this system provides advanced capabilities
with a simple structure, it does present a number of research issues
fundamental to its implementation which are our current focus: motion
control and planning, dynamic stabilization, sensor instrumentation,
and data fusion.
Mobile robots are integral to space exploration and many military
activities. This research examines a new robot architecture that
provides advanced maneuverability, suspension to adapt to uneven
terrain, and modularity to adapt to different tasks. This is
accomplished by coupling differentially steered axle modules with
compliant frame elements that allow relative roll, pitch, and yaw
between the axles. While this system provides advanced capabilities
with a simple structure, it does present a number of research issues
fundamental to its implementation which are our current focus: motion
control and planning, dynamic stabilization, sensor instrumentation,
and data fusion.
Miniature Climbing Robots with Under-Actuated and Hybrid Kinematic Structures
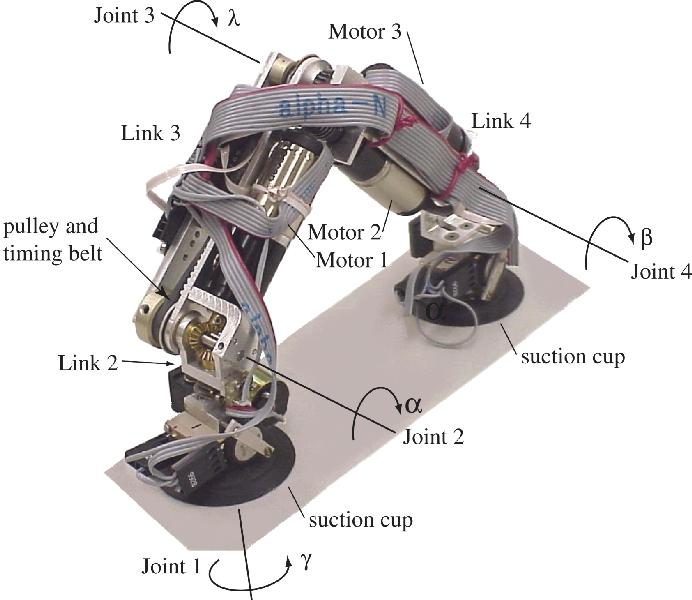 Climbing robots serve a multitude of functions ranging from military
reconnaissance to industrial inspection and service. Miniature
climbing robots, in particular, are well suited to operating in the
confined environments typical of these applications, but the challenge
for robots at these smaller scales is that their capabilities are
limited by actuator capacity and space limitations. This research
strives to improve the capability of miniature climbing robots using
under-actuated mechanical structures that allow one motor to power
multiple joints and in hybrid joint structures that allow a single
joint to perform multiple functions. A key part of this development
is advanced motion planning and control strategies that exploit the
mechanical features.
Climbing robots serve a multitude of functions ranging from military
reconnaissance to industrial inspection and service. Miniature
climbing robots, in particular, are well suited to operating in the
confined environments typical of these applications, but the challenge
for robots at these smaller scales is that their capabilities are
limited by actuator capacity and space limitations. This research
strives to improve the capability of miniature climbing robots using
under-actuated mechanical structures that allow one motor to power
multiple joints and in hybrid joint structures that allow a single
joint to perform multiple functions. A key part of this development
is advanced motion planning and control strategies that exploit the
mechanical features.
Augmenting Haptic Interfaces
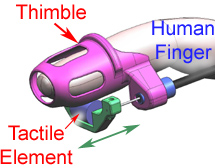 In everyday activities, we use our hands to assess the size, shape,
hardness, and texture of objects; however, many of the sensations used
to identify these properties are absent from current haptic
interfaces. Augmenting haptic devices with tactile feedback creates
the potential to tap into our innate experience when conducting manual
interactions with remote or virtual environments. The focus of this
research is to explore new avenues of tactile feedback used in
combination with commercial haptic devices, and includes new device
development and psychophysical evaluation. This research has
applications in telemanipulation (e.g., surgical robotics) and virtual
reality (e.g., medical training).
In everyday activities, we use our hands to assess the size, shape,
hardness, and texture of objects; however, many of the sensations used
to identify these properties are absent from current haptic
interfaces. Augmenting haptic devices with tactile feedback creates
the potential to tap into our innate experience when conducting manual
interactions with remote or virtual environments. The focus of this
research is to explore new avenues of tactile feedback used in
combination with commercial haptic devices, and includes new device
development and psychophysical evaluation. This research has
applications in telemanipulation (e.g., surgical robotics) and virtual
reality (e.g., medical training).